
Galera, e aí? Como foi o projeto do Braço Robótico Controlado por Comando de Voz via Bluetooth pelo celular? Já fizeram? Não sabe do que estou falando? Se não conhece ainda esse projeto acessa esse link e vai lá e confira como ficou top! E está tudo muito detalhado, é só comprar o kit aqui na Arduino Ômega que você terá em casa um projeto top para ensinar em sala de aula ou até mesmo se divertir de uma forma tecnológica maker com o filhão nesse período de pandemia que ficamos confinado em casa! Mas você deve estar se perguntando: e o projeto deste novo tutorial, qual será? Nós vamos montar um Tanque esteira lagarta com Arduino controlado por App/Bluetooth!
Apresentação do Projeto
Já pensou em controlar um tanque usando Arduino e o guiando via comandos passados por Bluetooth, usando um App para Android? Pois é, esse será o nosso projeto de hoje!
Este projeto que estamos iniciando hoje será montado em duas partes, pois são dois projetos que iremos integrar, este primeiro que é o tanque, e na segunda parte, vamos terminar com um robô também controlado pelo celular, muito massa e diferente de muitos projetos tradicionais que encontramos na internet, aqui na Arduino Ômega buscamos montar projetos diferenciados e customizados, que você só encontra aqui com a gente!
Nessa primeira parte, que é este post que você lê neste momento, iremos montar um tanque esteira tipo lagarta, controlando-o por um aplicativo de celular(que foi desenvolvido por nós) via Bluetooth.
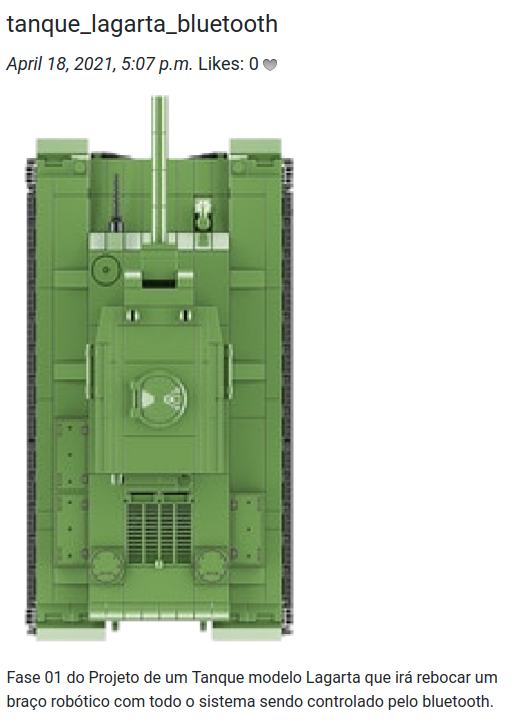
Na segunda parte, como já temos um conhecimento prévio de braço robótico (se você ainda não conhece, acesse os nossos tutorias sobre Braço Robótico Controlado por Joystick e o Braço Robótico Controlado por Voz), nós iremos integrar o braço robótico junto com o tanque em um reboque como na imagem abaixo:
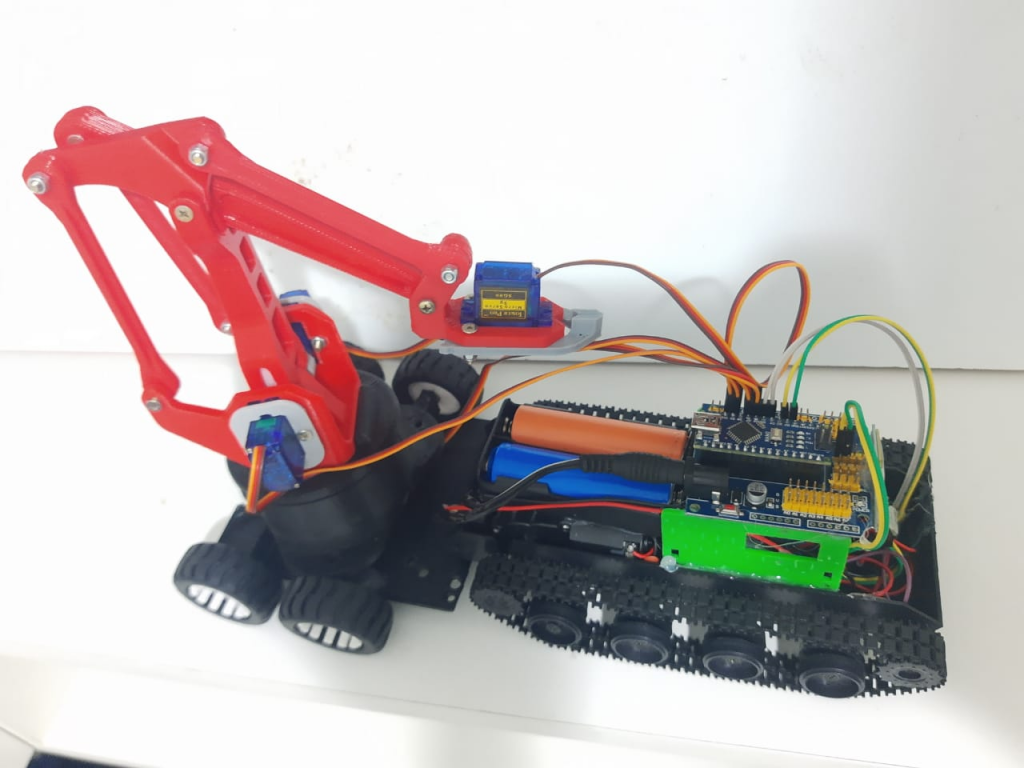
E no fim, o tanque e o braço serão controlados por um único Arduino e aplicativo!
TANQUE ESTEIRA LAGARTA VIA BLUETOOTH
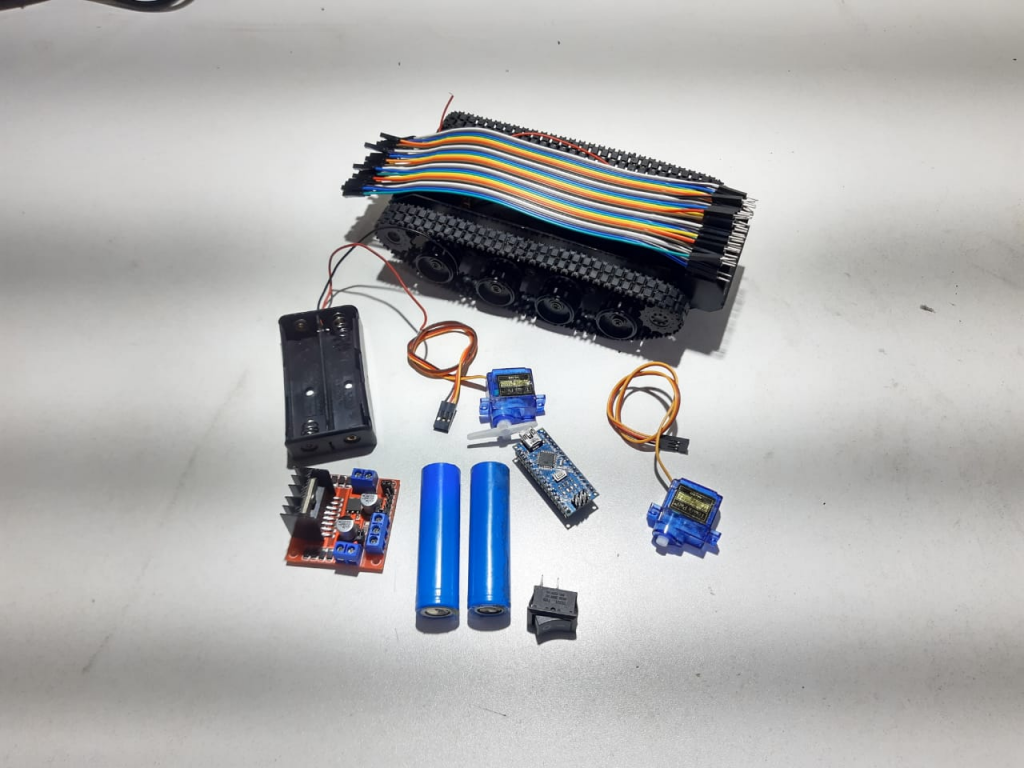
1 – Material utilizado

Esse chassi é sensacional, ele tem um design de ataque com a esteira levantada podendo vencer qualquer obstáculo a frente como batente, pedras ou lixo. O motor, estrategicamente, posicionado na parte traseira proporciona uma força na arrancada onde a parte frontal levanta levemente facilitando com que o tanque vença o obstáculo a frente.
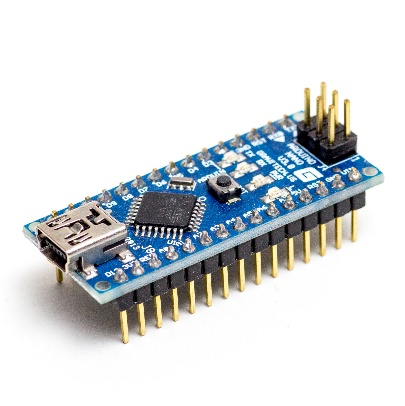
Foi escolhido este modelo de Arduino pelo seu tamanho compacto e robustez eletrônica.
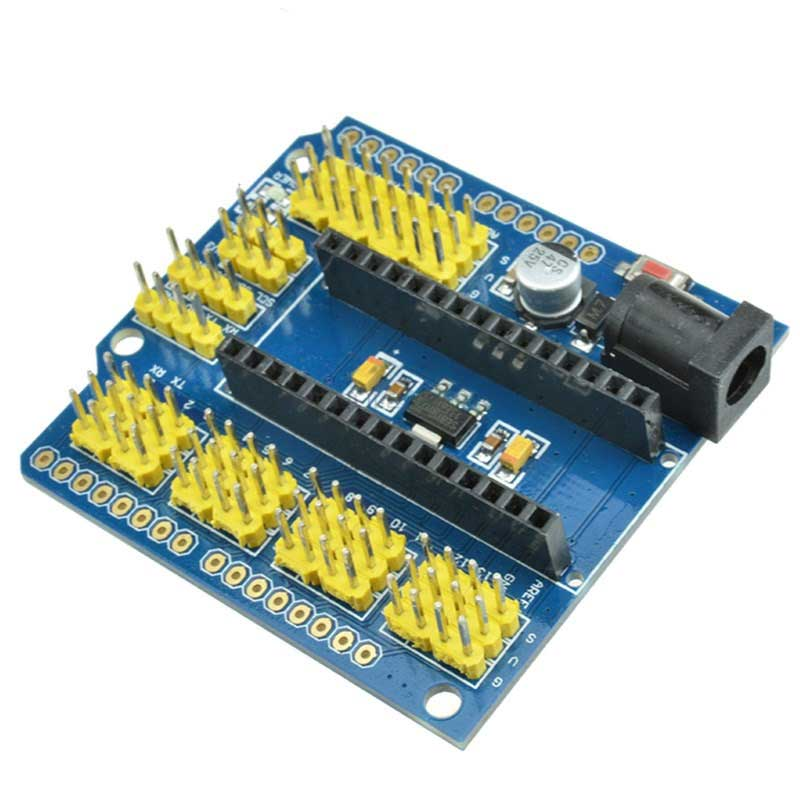
A shield é a sacada deste projeto, pois podemos alimentá-la pelo pino Jack P4 diretamente da bateria de Lítion, 9,4v, sem a necessidade de usar um regulador de tensão e este Shield irá baixar a tensão para 5v, que é a tensão nominal dos servos motores que usaremos no próximo post, formando um barramento de positivo e negativo, ideal para conexão dos servos-motores que estará no braço robótico.

Padrão de comunicação Bluetooth, só lembrando que este modelo não é compatível com aparelhos Iphone.
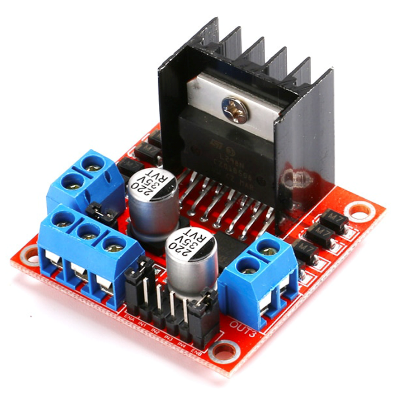
Ponte H para controle da velocidade e direção dos motores do tanque, onde estes (os motores )não será necessário comprar pois já vem dentro do chassi.

Jumpers para interligar os módulos.

Um suporte para 02 baterias em série de Litio 18650 para garantirmos corrente suficiente em nosso circuito, pois você deve lembrar que teremos 4 servos, 02 motores, 01módulo bluetooth e eletrônicos que irão demandar consumo de energia, pilhas simples alcalina não seria a melhor solução.
- 02 Baterias de Lítio 18650
2 – Visão Geral do Circuito
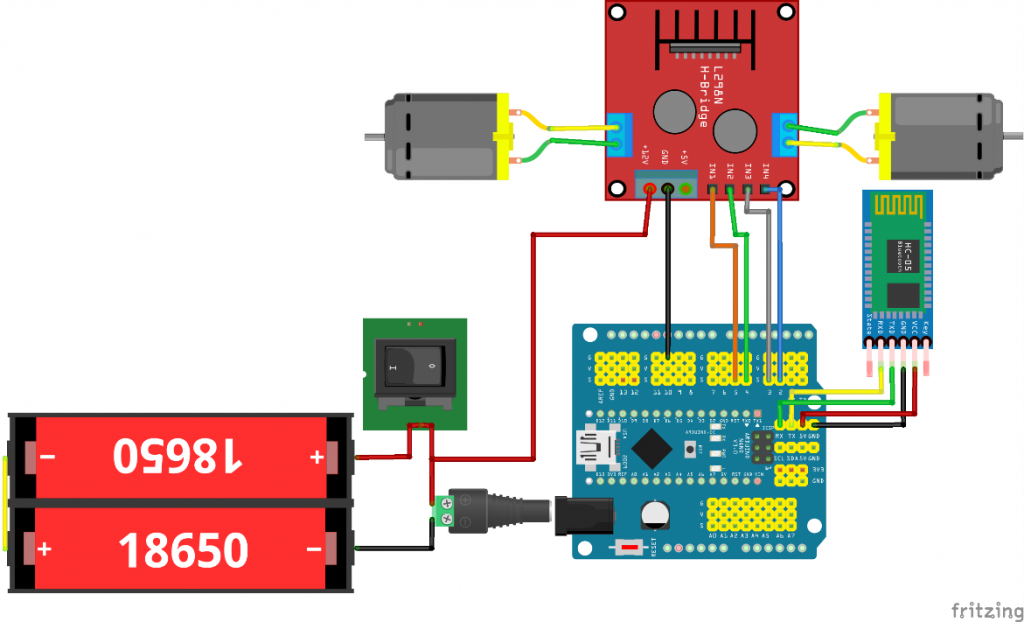
O circuito de montagem do tanque é simples e bem objetivo, observe que tudo está distribuído e organizado de uma forma que possibilita uma manutenção rápida e entendimento claro para qualquer maker montar o seu, desde o iniciante até os mais avançados, aliás, caso você tenha sugestão de melhorias, pode comentar neste post, vamos contribuir com a comunidade maker! E você ainda pode ter o seu nome creditado em nosso artigo!
Caso deseje o arquivo no formato .fzz editável do fritzing, comenta aqui deixando seu e-mail que enviaremos o arquivo editável e todos os componentes que tenho incluído no meu programa pessoal, e olhe que são muitos, só pra você ter uma ideia, olha o print da minha tela na imagem abaixo.
3 – Montando o circuito
Para montar seu projeto, você precisará de algumas ferramentas como alicate de corte, alicate de bico, estilete, cola quente e ferro de solda. Também é bom ter em mãos um multímetro para sempre medir a tensão nos pinos e a continuidade dos jumpers, acredite, muitos problemas de mal funcionamentos provêm de cabos jumpers partidos e sempre começamos os testes achando que é o código com erro ou hardware queimado e após 1h quebrando a cabeça é que vamos testar os jumpers e identificamos que era ele o causador do defeito, então vou passar algumas recomendações:
- Teste a continuidade de todos os cabos jumpers antes de iniciar a montagem, se você não sabe como testar a continuidade, basta posicionar a chave do multímetro para a posição teste de diodos.
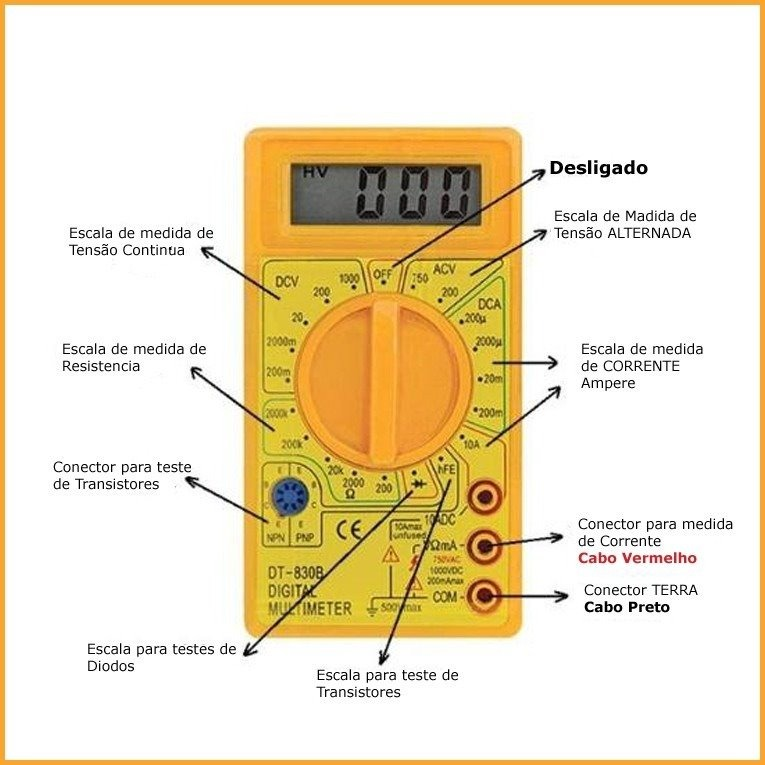
Observando a imagem acima você tem a ilustração dos demais testes, como tensão e resistência.
- Conecte o fio dos motores na ponte H e verifique o sentido de rotação, caso a esteira esteja girando de uma forma que você não espera, inverta a polaridade do motor que está invertido no borne azul da ponte H.
- O ultimo ponto que gostaria de observar que frequentemente há problemas é na chave on/off, teste ela também usando o multímetro no modo continuidade (testes de diodo) e verifique se ela se comporta como o esperado: Bipando quando a chave for fechada (posição I) e não silêncio quando a chave estiver na posição aberta (posição 0).
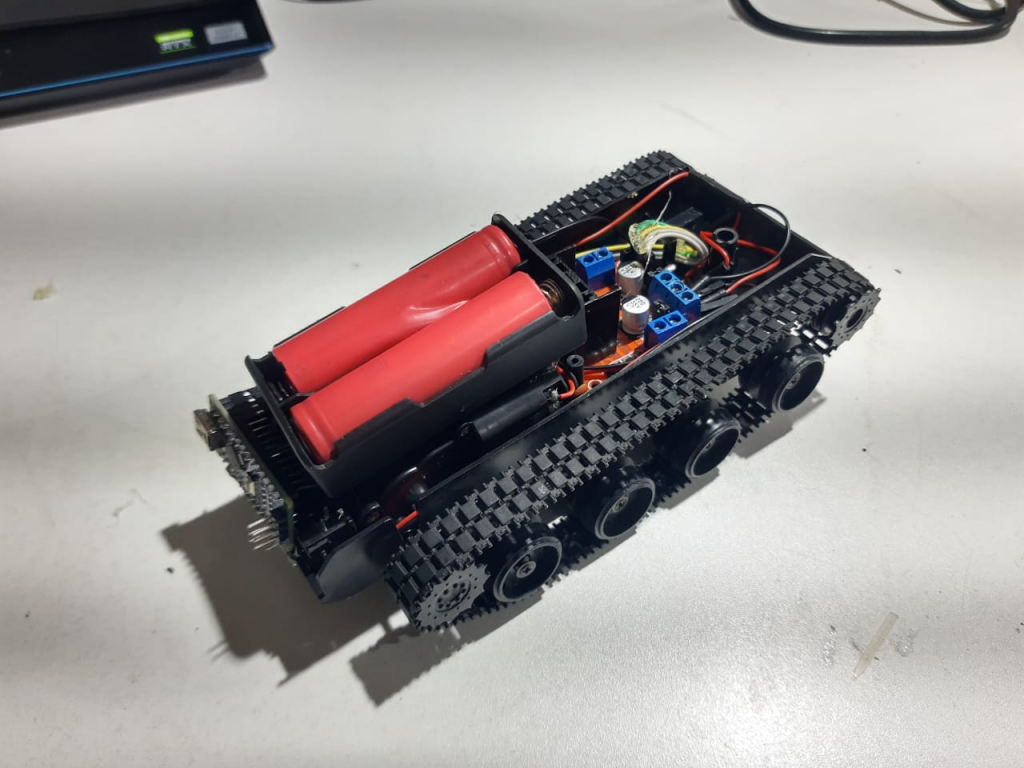
Após a montagem seu tanque deverá ficar semelhante a este da imagem acima, ahhhh, estamos desenvolvendo uma case, a parte de cima do tanque, modelando na impressora 3D para compartilhar com vocês, ai em outro momento teremos um post de “up” para dar um “chan” nesse nosso projeto inserindo uma carcaça d’hora no nosso tanque.
Abaixo você pode ver um vídeo de demonstração do tanque funcionando, este vídeo está disponível no meu Instagram clicando neste link, me segue lá em @profsandromesquita para ver mais conteúdos legais igual a este, inclusive lá já tem vídeo do tanque funcionando com o braço robótico!
4 – Desenvolvendo o código fonte na IDE do Arduino
const byte N1 = 5;
const byte N2 = 4;
const byte N3 = 3;
const byte N4 = 2;
void setup() {
Serial.begin(9600);
for (byte pin = 2; pin < 6; pin++) {
pinMode(pin, OUTPUT);
}
}
void loop() {
if (Serial.available() > 0) {
char comando = Serial.read();
Serial.println(comando);
if (comando == 'f') { //Comando tanque para frente
direcao(0, 1, 0, 1); //Chamada da função direção N1=0, N2=1, N3=0, N4=1
}
else if (comando == 'p') { //Comando tanque parado
direcao(0, 0, 0, 0); //Chamada da função direção N1=0, N2=0, N3=0, N4=0
}
else if (comando == 'r') { //Comando tanque ré
direcao(1, 0, 1, 0); //Chamada da função direção N1=1, N2=0, N3=1, N4=0
}
else if (comando == 'd') { //Comando tanque para direita
direcao(0, 1, 1, 0); //Chamada da função direção N1=0, N2=1, N3=1, N4=0
}
else if (comando == 'e') { //Comando tanque para esquerda
direcao(1, 0, 0, 1); //Chamada da função direção N1=1, N2=0, N3=0, N4=1
}
}
}
void direcao(byte N1, byte N2, byte N3, byte N4) {
digitalWrite(11, N1); //Motor Esquerdo
digitalWrite(6, N2);
digitalWrite(7, N3); //Motor Direito
digitalWrite(8, N4);
}
O código está todo comentado, mas creio que não difere muito dos outros que temos postado aqui no nosso blog, caso tenha alguma dúvida ou necessite de uma explicação mais detalhada, comenta aqui que a gente tenta detalhar ainda mais!
5 – Desenvolvendo o Aplicativo no APP Inventor
Chegamos no nosso último ponto, o aplicativo para controlar o tanque, neste caso, iremos disponibilizar o arquivo editável, através do link abaixo ou então, caso prefira, comenta aqui que enviamos já o arquivo .apk para você instalar no seu celular.
Acesse o arquivo editável no App Inventor clicando aqui!
Lembrando que por não ser um aplicativo verificado pela app store, talvez seu celular bloquei a instalação sendo necessário que autorize através de configuração a instalação de aplicativos desconhecidos.
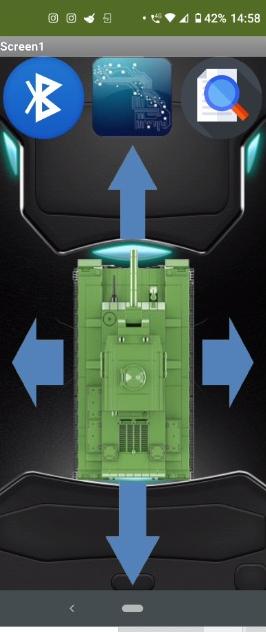
Nosso aplicativo tem esta aparência:
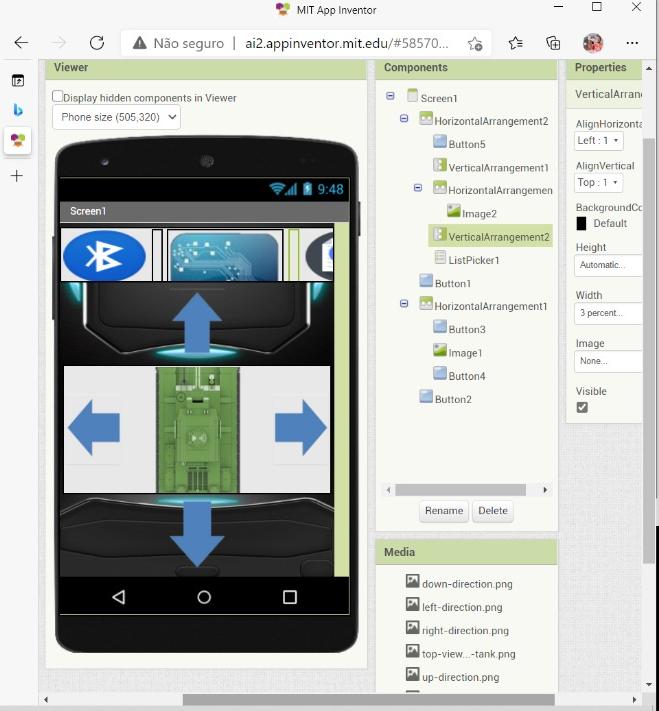
Se você optar em buscar o aplicativo editável e importar o projeto para a sua conta appinventor, no bloco de desenvolvimento da tela, a visão é um pouco diferente do produto concluído:
6 – Conclusão
A primeira vista pode parecer que um projeto de tanque é algo extremamente complexo, mas como vimos nesse tutorial, a parte mais complexa pode ser a montagem do circuito, já o código fonte é bem tranquilo, no fim é um projeto com um resultado visual bem legal e com um nível complexidade mediano! Quaisquer dúvidas, críticas e sugestões por favor escrevam nos comentários abaixo. E nos vemos na parte 2 desse projeto!
Ola, gostei do seu projeto, gostaria de perguntar se essa ponte h daria para usar dois motores de vidro elétrico de carro?
Olá tudo bem? Para motores mais robustos o ideal é usar a Ponte H BTS7960. Qualquer dúvida estamos a disposição! Abraço!
Oi Sandro
Bom dia
Sou tecnico em eletronica porem fraco ainda em programacao do arduino
Carreguei o programa na IDE do arduino
ai vem a mensagem: ‘direcao’ was not declared in this scope
Talvez possa me ajudar
Grato
Olá, poderia mandar o apk do aplicativo?
Olá Rafael. No tópico: 5 – Desenvolvendo o Aplicativo no APP Inventor, você encontra o link para acessar o arquivo editável no App Invetor, e ai gerar o APK do App, depois é só instalar no seu Android.
Abraço.